ニンテンドーアカウントでログインするにはJavaScriptを有効にしてご覧ください。
Nintendo




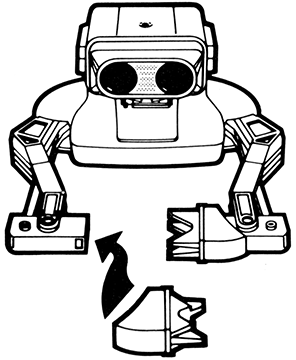
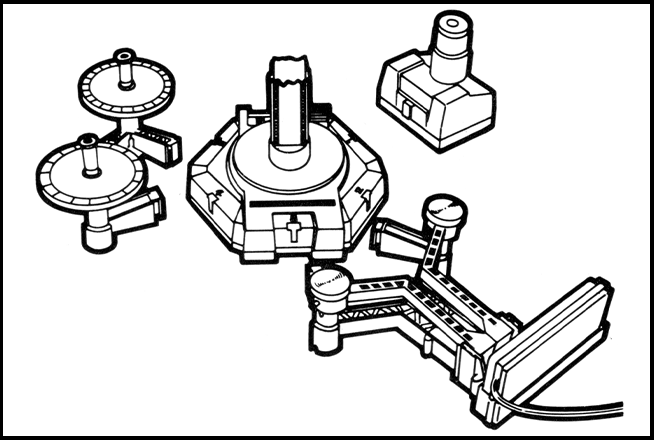
![コマ……………2個 コマホルダー…1個 コマトレイ ……1個 コマハンド ……2個 (単1乾電池[別売])コマスピナー…1個(単1乾電池[別売])カセット ………1個](assets/img/set-list.svg)
























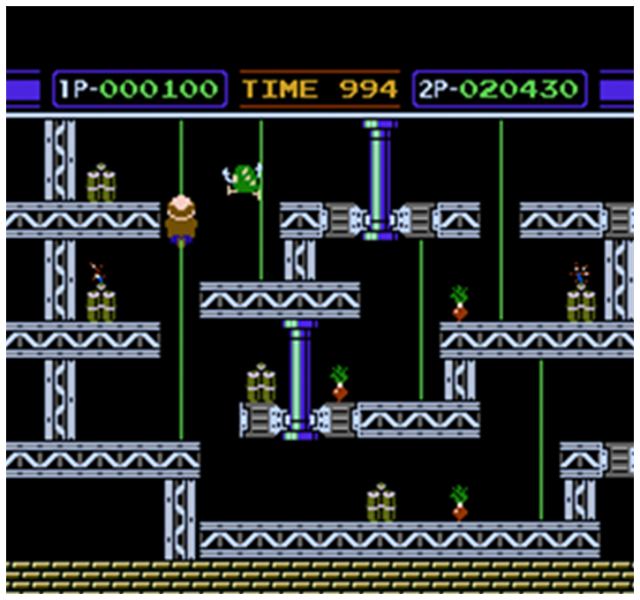
![GAME A[2人用]の場合は、2Pはベクター博士を操作します。[Ⅰ]コントローラーを交互に使用してください。操作方法やゲーム内容は、1人用と同じです。](assets/img/htp-2-w-0.svg)





















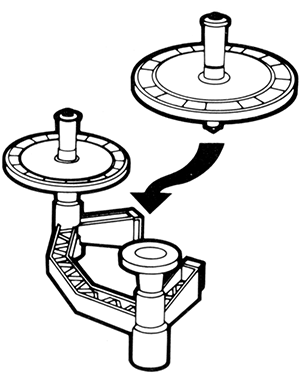

![トレイに[Ⅱ]コントローラーを、方向を間違えないようにセットする。](assets/img/set-group-pic-1-2-1.svg)




![2・3スリットにトレイ([Ⅱ]コントローラー)](assets/img/set-group-w-2-2.svg)






















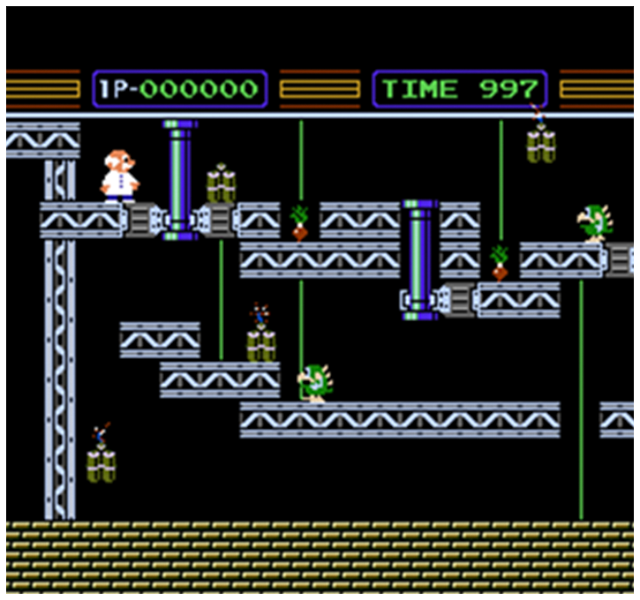
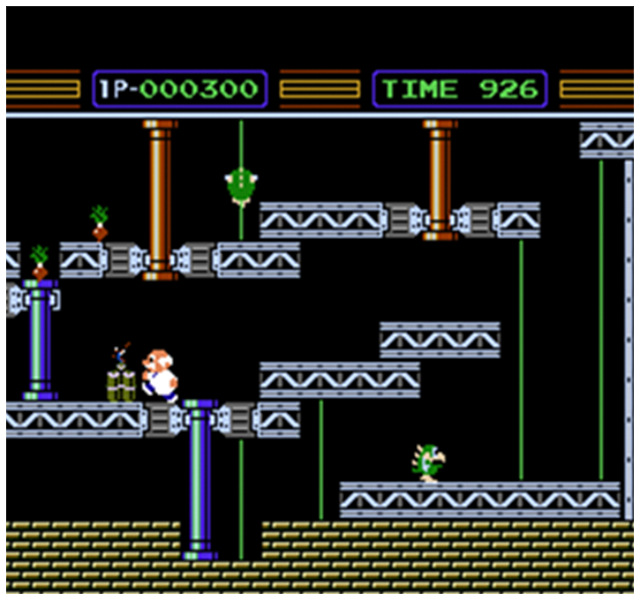
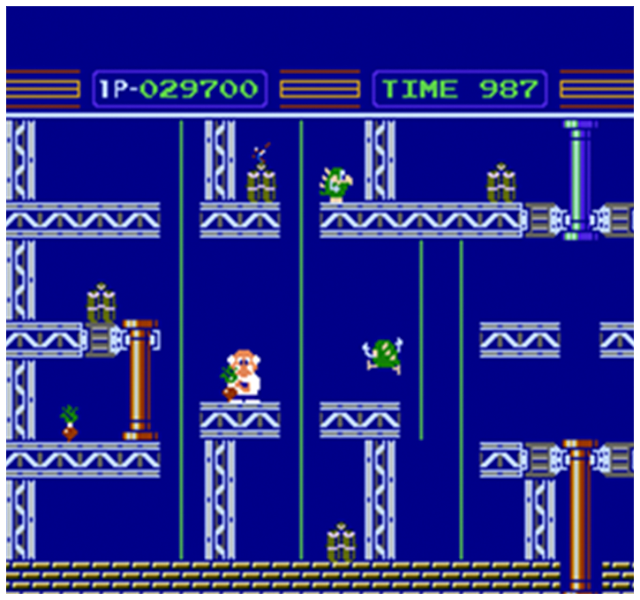
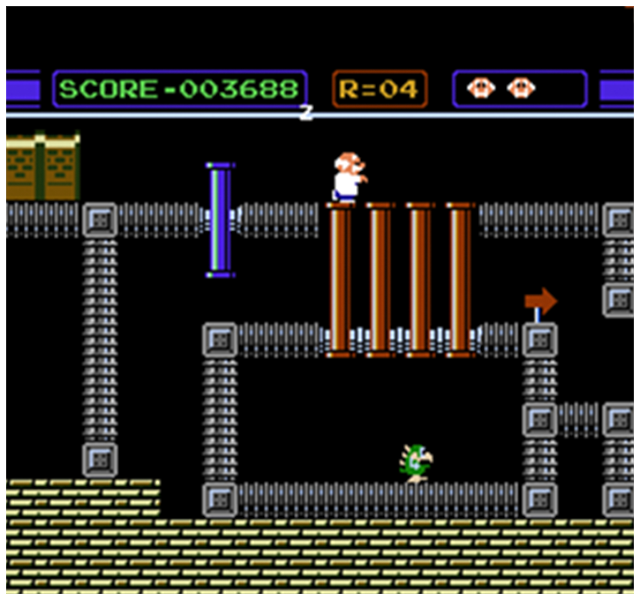
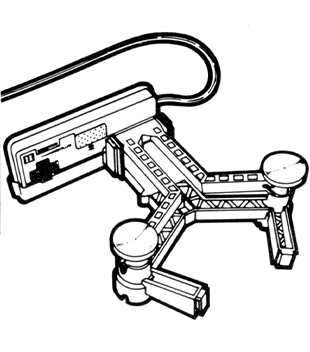
![[Ⅰ]コントローラーで博士を操作します。](assets/img/htp-list-1-1.svg)
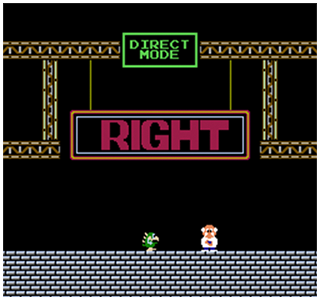
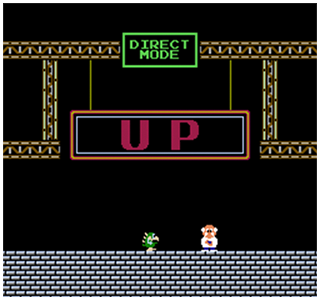
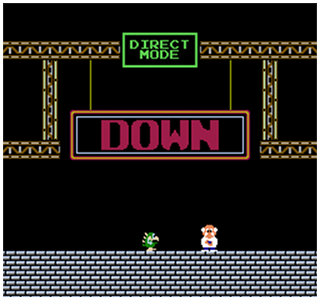
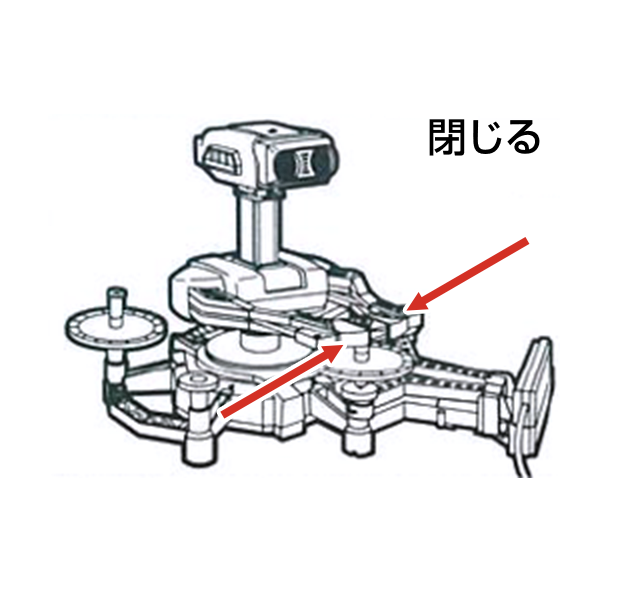
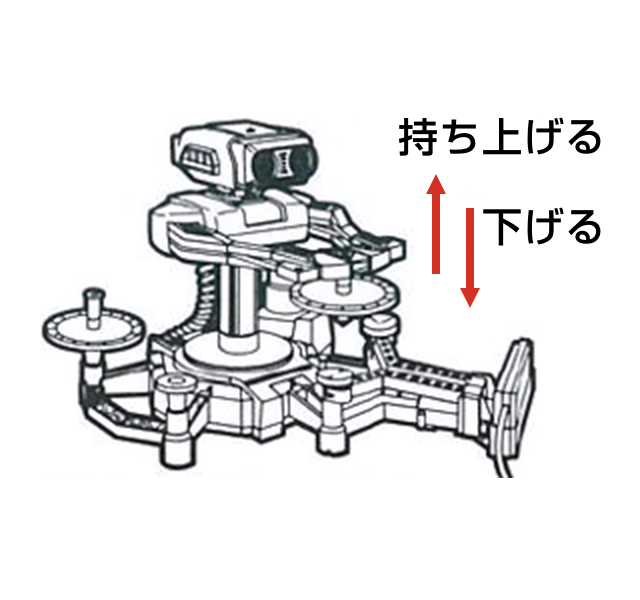
![ゲートを上下させるときは、STARTボタンを押して、ロボット送信モードにします。このとき、画面のバックは青くなり、[Ⅰ]コントローラーはロボット操作に機能が切り替わります。](assets/img/htp-list-1-2.svg)







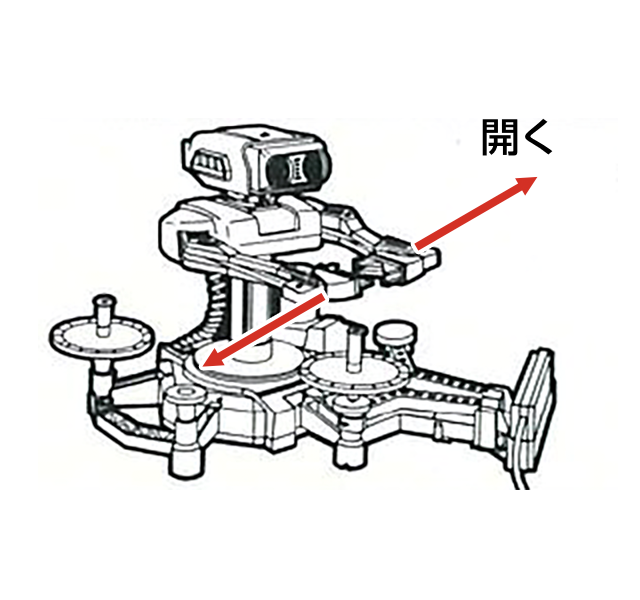
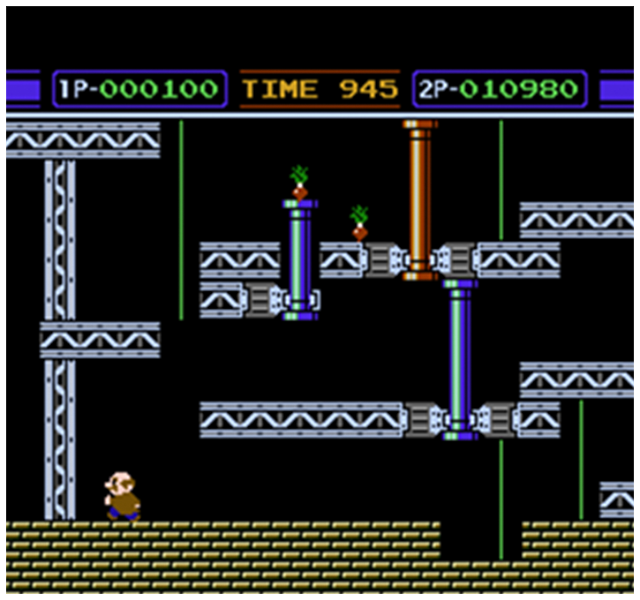
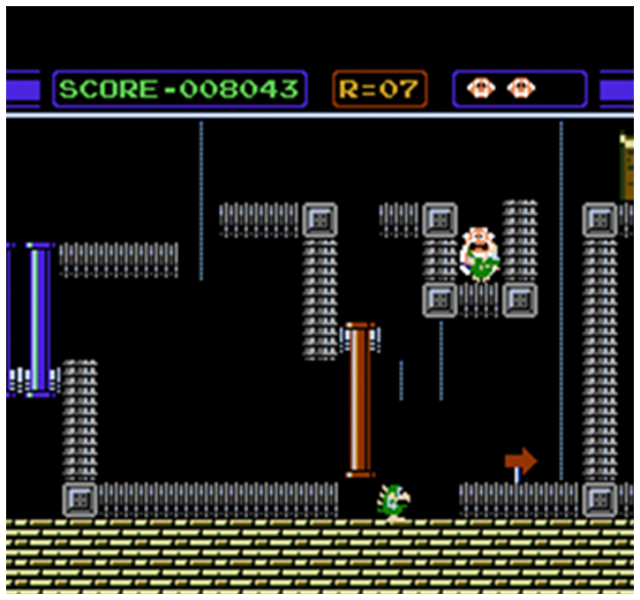
![このゲームでは、[Ⅰ]コントローラーでロボットだけを操作します(博士は操作しません)。](assets/img/htp-list-3-1.svg)




